Quick Search
QUICK SEARCH
제품검색
최근 본 제품
관심제품
서포트 툴
고객 서비스

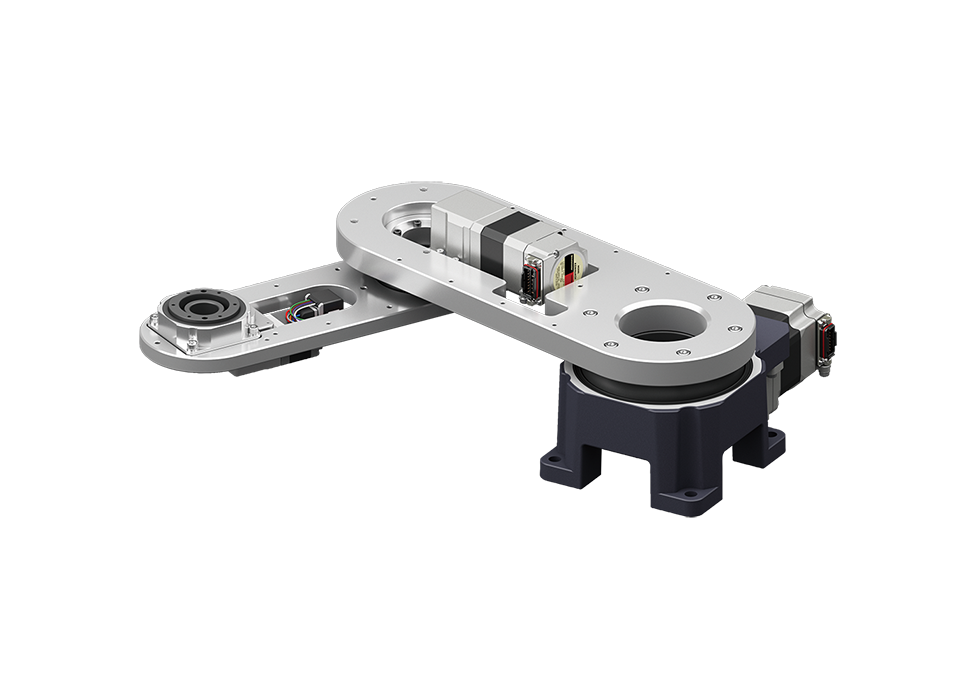
본체 무게는 불과 12.5kg, 설치 면적은 130x130mm. 소형·경량으로 운반 및 설치가 용이하며, 전동 슬라이더와 조합하여 수평 방향의 동작 범위를 확대하는 것도 가능합니다.
일부 모터를 고객이 교체할 수 있습니다. 도입 후의 메인터넌스 부담(비용·시간)을 경감합니다.
※ 당사에서도 유지 보수 시 모터 교환을 하고 있습니다. 가까운 영업소, 기술본부에 문의해 주세요.

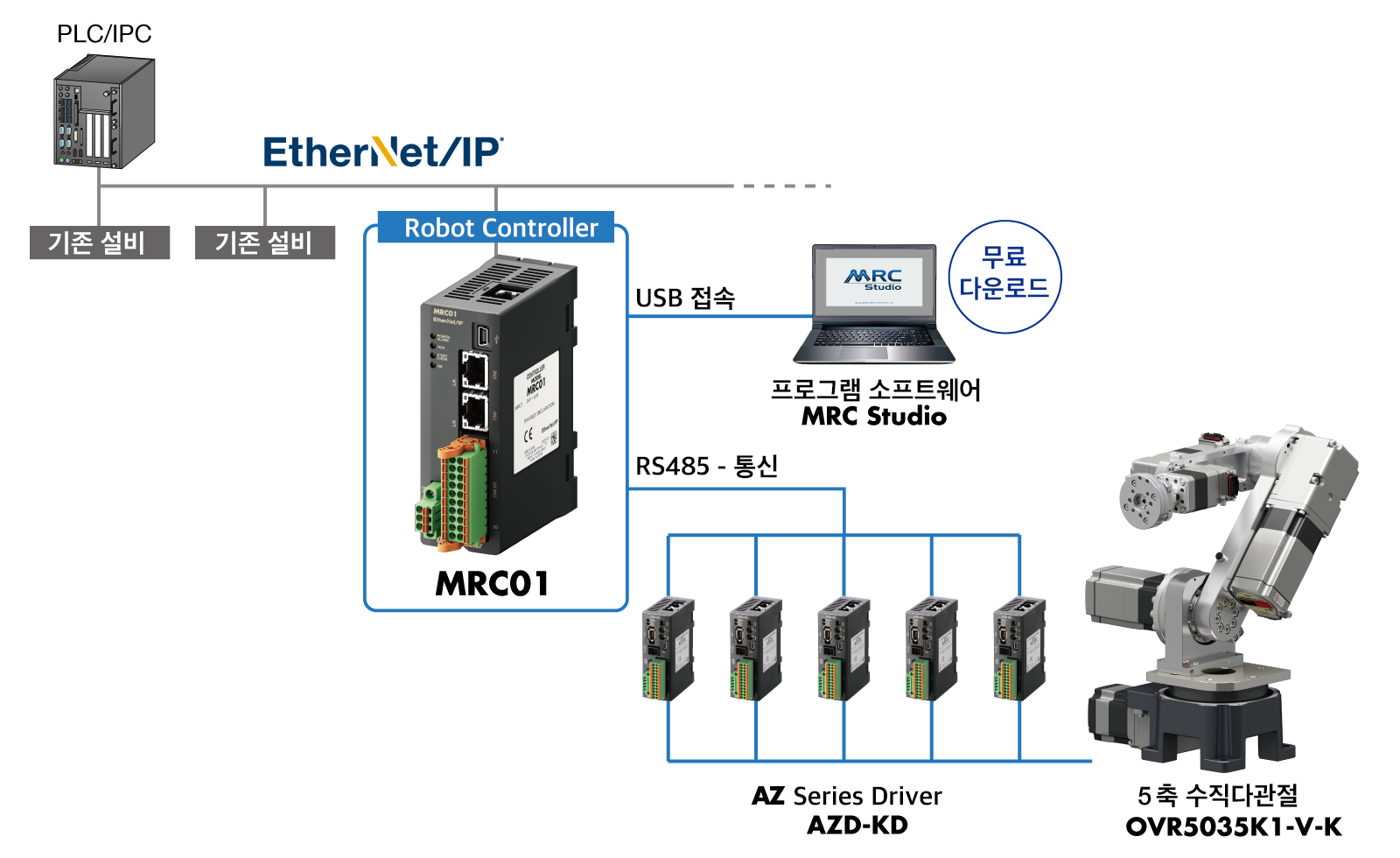
MRC01은 AZ Series를 탑재하고 있는 로봇을 제어하는 로봇 컨트롤러입니다.
프로그래밍 소프트웨어 MRC Studio(무료)는 로봇 제어 미경험자도 빠르게 마스터할 수 있을 만큼 간단한 소프트웨어입니다.
주의: 사용 시에는 산업용 로봇으로서 안전을 주의해 주십시오. (협동 로봇으로 사용할 수 없습니다)
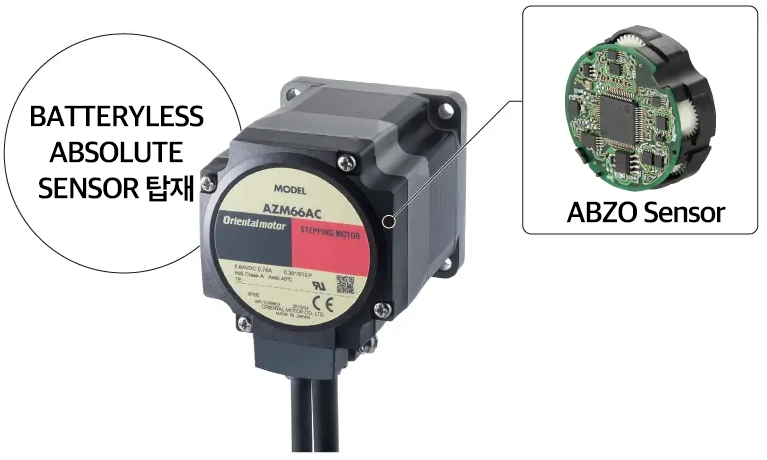
전축 αSTEP AZ Series(DC 입력)를 채용.
Absolute 방식으로 외부 센서가 불필요하기 때문에 배선이 절약되고, 배터리를 관리할 필요가 없어 유지 보수가 절감됩니다.
DC 입력으로 인해 전원 라인의 인출이 용이하며, 라인 설치 및 레이아웃 변경에 유연하게 대응할 수 있습니다.

로봇 도입을 검토하는 단계에서 로봇 본체나 로봇 컨트롤러 MRC01이 없어도 PC 상에서 실제 움직임을 시뮬레이션할 수 있는 소프트웨어(무료)입니다.

실제 공간에 가상 로봇을 설치하여 조작 시뮬레이션이 가능합니다.
스마트폰/태블릿용, 헤드 마운트 디스플레이(Meta Quest3)용을 준비하고 있습니다.
| 품명 | OVR5035K1-V-K | |
|---|---|---|
| 축 수 | 5축 | |
| 입력 전압 | DC24V | |
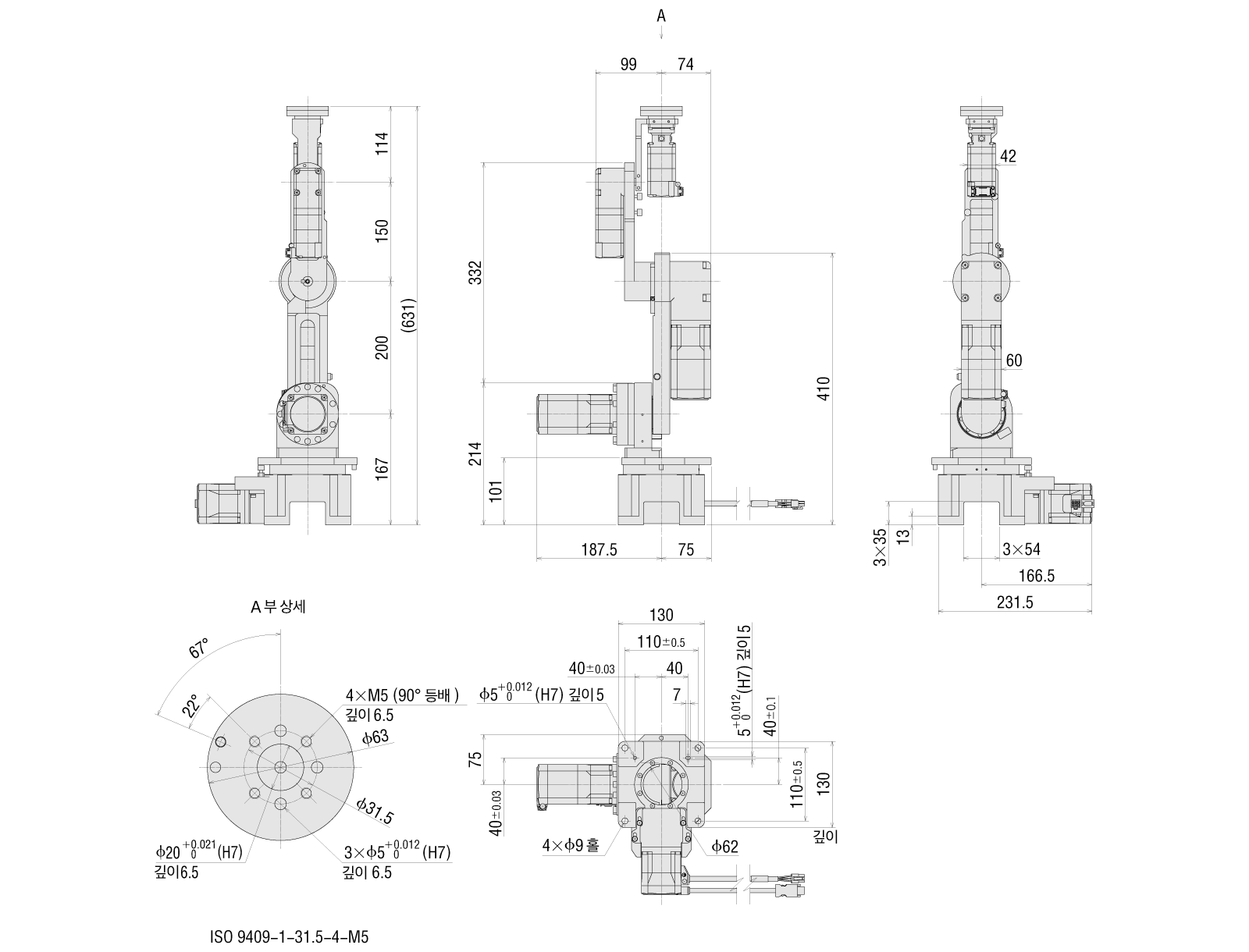
| 최대 reach 길이 | 수직 | 631mm(상향) |
| 수평 | 350mm(하향) | |
| 가반 무게 | 1kg | |
| 표준 사이클 타임 *1 | 0.9sec | |
| 가동 범위 *2 | S축(선회) | ±170deg |
| L축(하완) | -55~+105deg | |
| U축(상완) | -115~+145deg | |
| Bp축(손목 세로 요동) | -90~+125deg | |
| R축(손목 선회) | ±180deg *3 | |
| 반복위치결정정도 *4 | ±0.05mm | |
| 허용 관성 Moment(손목 선회축) | 0.0134kgm2 | |
| 본체 무게 | 12.5kg | |
| 설치 형식 | 가대 설치 | |
*1:부하 1kg시, 높이 25mm, 폭 300mm의 2점간을 왕복시키는데 필요한 시간입니다.
로봇 컨트롤러 MRC01을 사용했을 때의 사이클 타임입니다.
*2:원점 핀 구멍에 위치결정 핀을 넣은 설치 원점 자세(L, U, Bp축 수직 자세)의 상태에서 동작할 수 있는 범위입니다.
*3:로봇 컨트롤러 MRC01을 사용할 때는 ±170deg가 됩니다.
*4:각 축 감속기의 사양치에 근거합니다.
* 추천 전원 용량 DC24V 600W
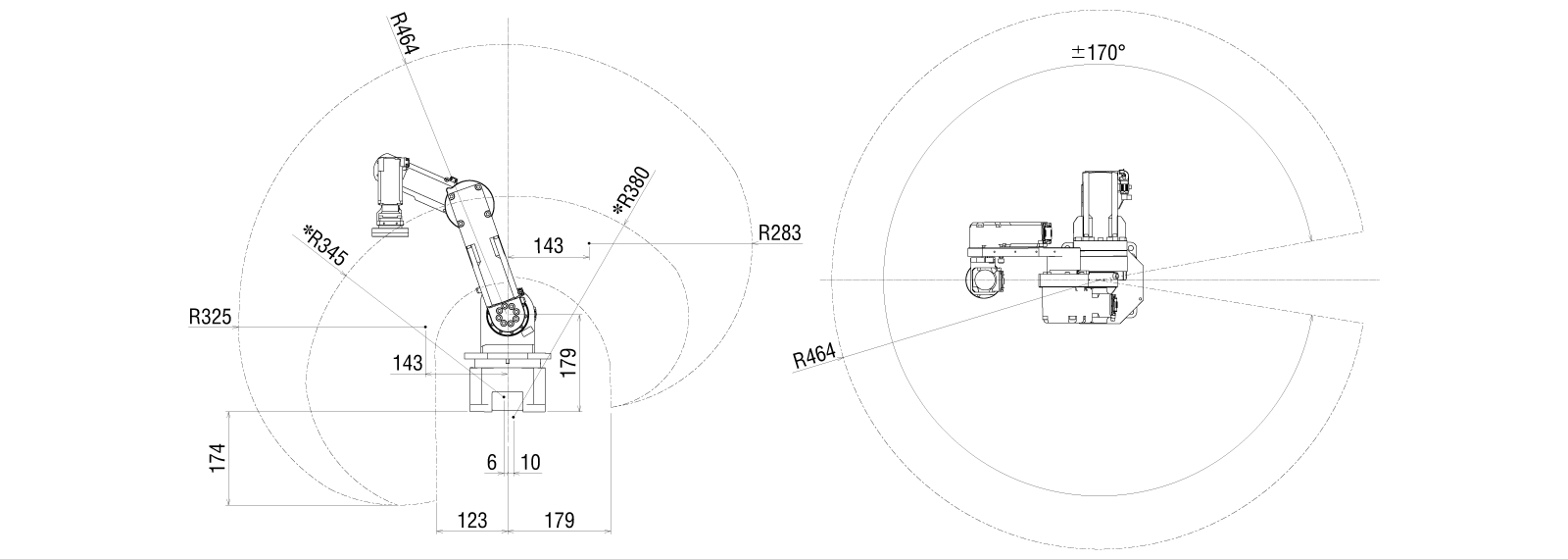
✽ 엔드 이펙터를 아래로 향했을 때 동작할 수 있는 범위입니다.
로봇, 로봇 컨트롤러, 드라이버, 케이블은 별도로 준비되어 있습니다.
로봇 컨트롤러 MRC01과 프로그래밍 소프트웨어 MRC Studio를 사용하여 쉽게 로봇 제어가 가능합니다.
MRC01에 연결할 수 있는 권장 드라이버는 DC 전원 입력 타입의 드라이버 AZD-KD 또는 mini 드라이버 AZD-KR2D입니다.
로봇의 요소를 기계·소프트웨어의 측면에서 배울 수 있는 공업 고등학교나 고등 교육 기관, 제조업 종사자를 위한 교재 로봇 세트입니다.
로봇 교육 도입 비용을 절감하는 동시에 특별한 교육도 불필요하기 때문에, 로봇의 교육 및 학습을 시작하는 분들이 간편하게 사용하실 수 있습니다.

낮은 비용으로 로봇 교육 및 학습을 시작할 수 있는 3축 소형 탁상 로봇
구조 학습을 할 수 있어 명령 아이콘을 이용한 프로그래밍도 간단하게 가능
설치 면적 φ16cm, 본체 무게 4.2Kg
최대 reach 길이(수평) 390mm※, 가반 무게 1kg, 반복 위치 결정 정밀도 ±0.1mm
※ Arm의 길이는 커스텀 가능
인아오리엔탈모터(주)대표이사신 동 진
서울 사무소
서울시 금천구 가산디지털 1로 168, 우림라이온스밸리 C동 807호
대표번호02-2026-0650기술문의080-777-2042
인천 사무소
인천광역시 남동구 앵고개로 490번길 119, 남동공단 144B - 9L
Tel032-819-8721Fax032-819-8671
사업자등록번호139-81-28682
통신판매등록 번호2017 - 인천남동구 - 0852
Copyright 2023. INA ORIENTAL MOTOR Inc. All Rights Reserved.
본 사이트의 컨텐츠는 저작권 보호를 받고 있으며,
모든 이미지와 내용 등의 상업적 이용시에 법의 제재를 받게 됩니다.