





chapter 31
스테핑 모터와 서보 모터의 구분은? 모터 구조와 특성은 다른가요?
| 스테핑 모터와 서보 모터의 구분은? 모터 구조와 특성은 다른가요? | |
| 학생 | 선생님, 스테핑 모터와 서보 모터에 대해 질문해도 될까요? |
| 선생님 | 물론이죠. |
| 학생 | 스테핑 모터와 서보 모터 둘 다 정확한 위치 결정을 할 수 있는 모터라고 알고있는데 무엇이 다른가요? 라는 고객으로부터 문의가 있었습니다. |
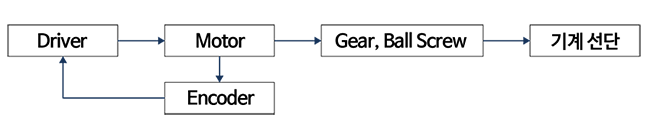
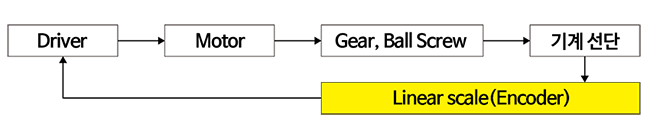
| 선생님 | 그렇군요. 한번 정리해볼까요? 우선은 각각의 모터의 구조에 대해 간단히 설명할게요. 스테핑 모터와 서보 모터는 스테이터와 로터라는 부품으로 구성되어 있어요. 이 두 부품이 서로 끌어당겨서 위치를 정하고 있다는 점은 동일한데 부품의 구조가 달라요. 아래 그림을 보면 스테핑 모터는 로터의 바깥쪽이 톱니 형태로 되어있어 각각의 톱니와 스테이터가 조금씩 끌어당겨 정확도가 높은 위치 결정을 실현하고 있어요. 그에 반해 서보 모터는 기계적인 구조로 위치결정 정밀도를 높이고 있는 것이 아니라 위치센서(엔코더)로부터의 피드백 정보를 바탕으로 위치 결정을 하고 있어요. |
5상 스테핑 모터와 서보 모터의 구조 |
|
| 학생 | 아하~ 그렇군요. |
| 선생님 | 다음은 기본적인 특징을 살펴볼까요? 특징 차이는 어떤 것이 있을까요? |
| 학생 | 음… 게인 조정이 필요한 거 아닌가요? |
| 선생님 | 게인 조정도 있지만 더 알기 쉬운 차이가 있어요. 토크 특성 그래프를 보면 힌트가 될거에요. |
| 학생 | 토크 특성인가요? |
| 선생님 | 맞아요. 토크 특성 차이를 살펴볼까요? |
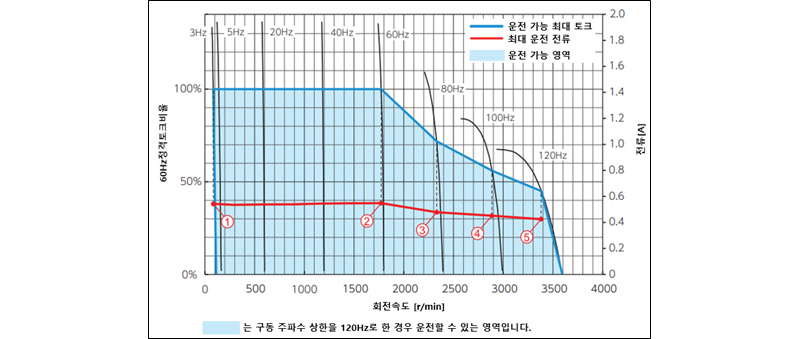
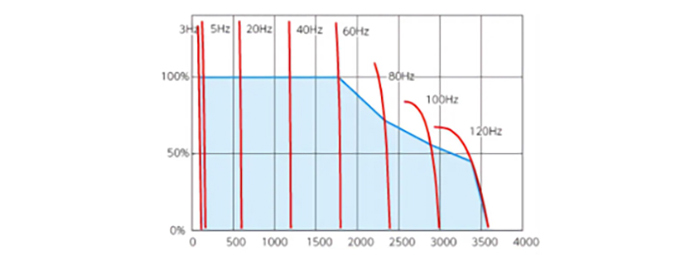
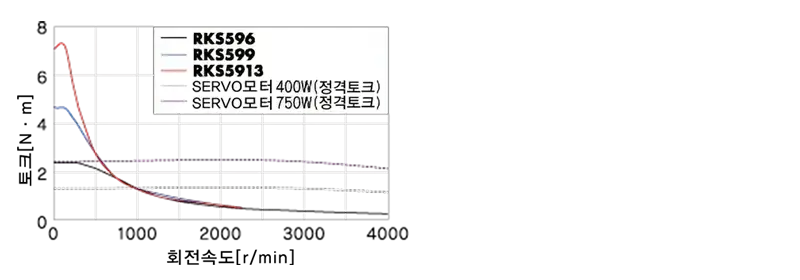
스테핑 모터와 서보 모터의 토크 특성 비교 |
|
| 학생 | 이 토크 비교는 알기 쉽네요! 스테핑 모터는 중?저속 영역에서 토크가 크고, 서보 모터는 고속 영역에서 토크가 크군요. |
| 선생님 | 이 토크 특성 그래프의 경향에서 무엇을 말할 수 있을까요? |
| 학생 | 음… 스테핑 모터는 중?저속 영역에서의 사용이 적합하고, 서보모터는 고속 영역에서 적합하다는 것인가요? |
| 선생님 | 맞아요. 그럼 중?저속 영역에서 사용하는 용도는 어떤 것이 있을까요? |
| 학생 | 고속까지 올릴 필요가 없는 용도라면.. 이동량이 적은 인덱스 테이블의 피치 이송 인가요? |
| 선생님 | 맞아요! 피치 이송과 같이 위치결정운전시의 이동량이 적은 동작이라면 필요한 회전 속도가 1000r/min 이하인 경우가 많으니까요. |
| 학생 | 그렇군요. 반대로 서보 모터는 고속에서도 토크가 떨어지지 않기 때문에 롱 스트로크로 고속까지 올리고 싶은 경우에 적합하다는 것이군요. 예를 들어 볼스크류 기구부요! |
| 선생님 | 볼스크류라도 세밀한 인칭 운전이라면 스테핑 모터로 충분하기 때문에 숏 스트로크라면 스테핑 모터, 롱 스트로크라면 서보 모터라고 구분하는 것이 좋아요. |
| 학생 | 잘 알겠습니다. 우선 구조나 특성 차이에 대해 고객에게 설명하려고 합니다. 그 밖에도 스테핑 모터와 서보 모터를 구분하여 사용하는 포인트가 있을까요? 좀 더 알려주세요. |
| 선생님 | 이번에는 스테핑 모터와 서보 모터 각각의 구조 및 특성에 대해 설명했지만, 성능의 차이에 대해서도 알아두면 좋아요. 이건 다음 시간에 합시다. |
| 학생 | 네, 알겠습니다! |


-1.webp)
-2.webp)
-3.webp)
-4.webp)
-5.webp)
-6.webp)
-7.webp)
-8.webp)
-9.webp)
-10.webp)
-11.webp)
-12.webp)