Quick Search
QUICK SEARCH
제품검색
최근 본 제품
관심제품
서포트 툴
고객 서비스
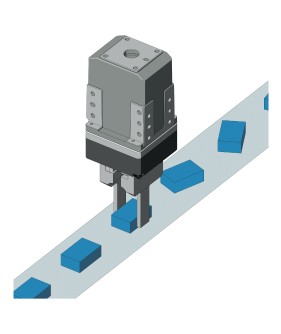
운전 전류를 1% 단위로 설정하여 잡는 물건에 맞춰 파지력을 다양하게 컨트롤할 수 있습니다.
1% 단위로 파지력 조정(2개 발톱 · 3개 발톱)
공압 그리퍼에서의 레귤레이터(감압 밸브) 조정이 불필요. 디지털 설정으로 간단하고 미세하게 파지력을 조정할 수 있습니다.
0.02mm/s 단위로 속도 조정(2개 손톱)
공압 그리퍼로 스피드 컨트롤러(속도 제어 밸브) 조정이 불필요.
0.02mm 단위로 이동량 조정(2개 손톱)
스테핑 모터의 위치 결정 정밀도의 높이를 살린 그리퍼입니다.
ABZO 센서로 위치 모니터(2개 발톱 · 3개 발톱)
자세한 위치 정보를 모니터링할 수 있습니다. 2개의 클로 타입에서는 위치 정보를 워크의 크기 판정에도 활용할 수 있습니다.
2개의 손톱 타입과 3개의 손톱 타입의 비교
| 유형 | 2개 발톱 ※1 | 세 손톱 | ||
|---|---|---|---|---|
| 파지에 적합한 워크 형상 |  | 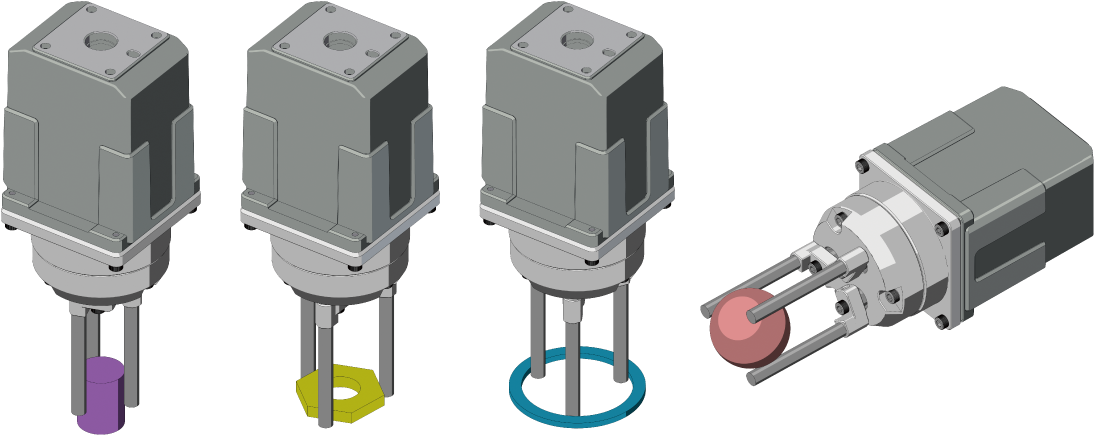 | ||
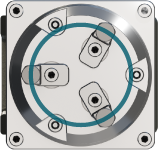
| 이동 범위 | 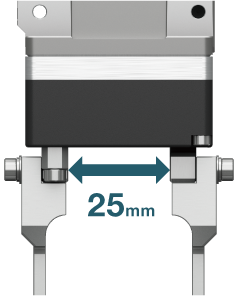 |  |  | |
| 개시: PCDΦ30.9mm | 폐시: PCDΦ7mm | |||
 |  | |||
| 개방 폭: PCDΦ23.9mm | ||||
| 최대 파지력[N] | 25 | 50 | ||
| 허용하중[N] (허용축방향하중[N] ※2) | 5 | 15 | ||
| 질량[kg] | 0.38 | 0.38(설치 커버 부착) 0.28(설치 커버 없음) | ||
인아오리엔탈모터(주)대표이사신 동 진
서울 사무소
서울시 금천구 가산디지털 1로 168, 우림라이온스밸리 C동 807호
대표번호02-2026-0650기술문의080-777-2042
인천 사무소
인천광역시 남동구 앵고개로 490번길 119, 남동공단 144B - 9L
Tel032-819-8721Fax032-819-8671
사업자등록번호139-81-28682
통신판매등록 번호2017 - 인천남동구 - 0852
Copyright 2023. INA ORIENTAL MOTOR Inc. All Rights Reserved.
본 사이트의 컨텐츠는 저작권 보호를 받고 있으며,
모든 이미지와 내용 등의 상업적 이용시에 법의 제재를 받게 됩니다.