Quick Search
QUICK SEARCH
제품검색
최근 본 제품
관심제품
서포트 툴
고객 서비스
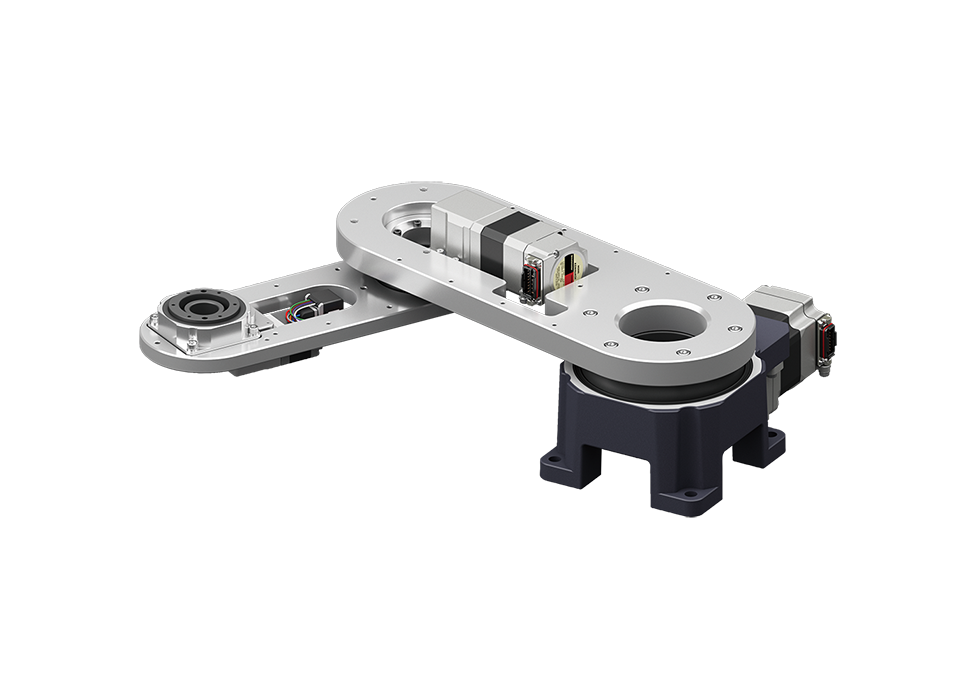
DGII시리즈는 중공 ROTARY TABLE과 STEPPING MOTOR를 조합한 일체형 제품입니다.
ACTUATOR 내부는 감속기 구조(감속비 18)로 되어 있으며, 고출력 구동이 가능합니다.
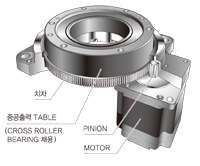
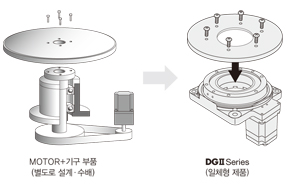
출력 Table에는 장비의 Table 및 Arm을 직접 설치할 수 있습니다.
Belt나 Pulley 등의 기구 부품을 사용한 경우에 비해 기구설계, 부품수배,Belt Tension 조정 등에 드는 수고나 비용을 줄일 수 있습니다.
대구경의 중공 HOLE (관통)은 설치가 복잡한 배선·배관에 이용할 수 있으며 장비설계의 간소화가 가능합니다.
Standard Type은 출력 Table의 Bearing에 Cross-Roller Bearing을 채용하여 고하중·고강성을 실현하였습니다.
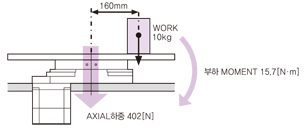
최대 허용 Axial 하중 4000N
최대 허용 Moment 100N·m
액츄에이터 품명:DGM200R-AZAC
드라이버:AZD-CD
전원 입력:AC200V
돌출거리:160mm
설치방식:수평
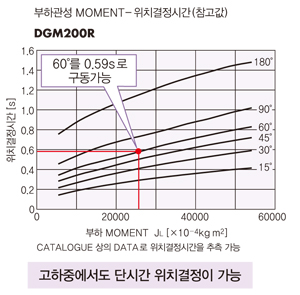
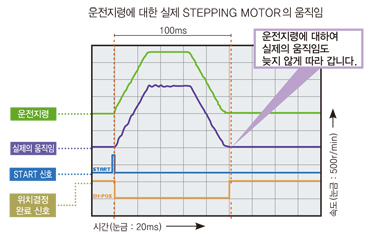
Stepping Motor는 단거리 위치결정을 단시간에 실시할 수 있습니다.
Stepping Motor는 Pulse 지령에 대해 동기운전을 실시하며 소형, 고Torque Motor이므로 가속성 및 응답성이 뛰어납니다.
액츄에이터 품명:DGM200R-AZAC
드라이버 품명:AZD-CD
전원 입력:AC200V
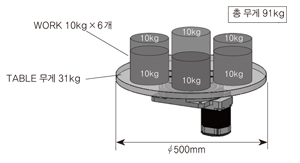
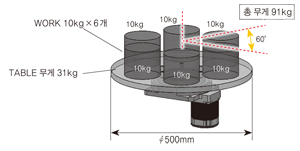
반송 무게:91kg(워크 6개+테이블)
TABLE 31kg (직경 500mm, 두께20mm, 철제)
WORK 10kg× 6개
설치방향:수평
이동량:60°
TABLE과 WORK의 합계관성 MOMENT=26330×10-4kg·m2
Stepping Motor의 Microstep 구동방식과 Smooth Drive 기능※으로 감속기구 등의 기계적 요소 없이 분해능을 향상시킬 수 있습니다.
이로 인해 저속에서도 고속변동이 적으며 일정한 속도를 계속 유지할 수 있습니다.
통상시에는 Open Loop 제어로 운전하므로, 부하변동 등이 있는 경우에도 설정대로의 동작을 Tuning 없이 얻을 수 있습니다.
통상시에는 Open Loop 제어로 정지 시에 축이 미미하게 움직이는 Hunting이라는 현상을 일으키지 않습니다. 정지위치를 확실히 유지하므로
정지 시에 진동이 있으면 곤란한 용도에 최적입니다.
중공 Rotary Actuator, Motor Unit 모두 고성능 제품을 채용. 고하중·고강성·고정도의 뛰어난 성능을 가지며,
폭넓은 용도에 사용할 수 있는 표준Type
최대 허용 회전력 50N·m
최대 허용 축 방향 하중 4000N
·반복적 위치 결정 정도±15arcsec(±0.004°)
NON BACKLASH 의 고 정밀 위치 결정
표준Type Cost Performance가 뛰어나며 간편하게 사용할 수 있는 Rotary Actuator
최대 허용 축 방향 하중 300N
·반복적 위치 결정 정도±30arcsec※(±0.008°)
※DG60에서 15arcsec
·Backlash 5arcmin※
※DG60는 non backlash
출력 테이블 지지 베어링:홍두깨 베어링
액츄에이터 붙임각 [mm] | 탑재 모터 시리즈 | 드라이버 타입 | 전원 전압 [V] | 중공 지름 [mm] | 허용 토오크 [N·m] | 허용 모우먼트 [N·m] | 허용 축 방향 하중 [N] |
|---|---|---|---|---|---|---|---|
85 | AR | 위치 결정 기능 내장 | 단상 100-120 단상 200-240 | φ 33 | 2.8 | 10 | 500 |
펄스열 입력 | 단상 100-115 단상 200-230 삼상 200-230 | ||||||
AZ | 위치 결정 기능 내장 | 단상 100-120 단상/삼상 200-240 | 4.5 | ||||
RS-485통신부 펄스열 입력 | |||||||
펄스열 입력 | |||||||
위치 결정 기능 내장 | DC24/48 | ||||||
RS-485통신부 펄스열 입력 | |||||||
펄스열 입력 | |||||||
130 | AR | 위치 결정 기능 내장 | 단상 100-120 단상 200-240 | φ 62 | 12 | 50 | 2000 |
펄스열 입력 | 단상 100-115 단상 200-230 삼상 200-230 | ||||||
AZ※ | 위치 결정 기능 내장 | 단상 100-120 단상/삼상 200-240 | |||||
RS-485통신부 펄스열 입력 | |||||||
펄스열 입력 | |||||||
위치 결정 기능 내장 | DC24/48 | ||||||
RS-485통신부 펄스열 입력 | |||||||
펄스열 입력 | |||||||
200 | AR | 위치 결정 기능 내장 | 단상 100-120 단상 200-240 | φ 100 | 50 | 100 | 4000 |
펄스열 입력 | 단상 100-115 단상 200-230 삼상 200-230 | ||||||
AZ※ | 위치 결정 기능 내장 | 단상 100-120 단상/삼상 200-240 | |||||
RS-485통신부 펄스열 입력 | |||||||
펄스열 입력 |
출력 테이블 지지 베어링:흐코즈 보올 베어링
액츄에이터 붙임각 [mm] | 탑재 모터 시리즈 | 드라이버 타입 | 전원 전압 [V] | 중공 지름 [mm] | 허용 토오크 [N·m] | 허용 모우먼트 [N·m] | 허용 축 방향 하중 [N] |
|---|---|---|---|---|---|---|---|
60 | AR | 위치 결정 기능 내장 | DC24 | φ 28 | 0.9 | 2 | 100 |
펄스열 입력 | |||||||
85 | RKII | 위치 결정 기능 내장 | 단상 100-120 단상 200-240 | φ 28 | 2.8 | 6 | 200 |
펄스열 입력 | |||||||
130 | RKII | 위치 결정 기능 내장 | 단상 100-120 단상 200-240 | φ 53 | 12 | 20 | 300 |
펄스열 입력 |
당사의 AZ Series DC전원 입력의 Motor와 AZ Series를 탑재한 전동 Actuator를 접속할 수 있습니다.
축 수:2축, 3축, 4축형

인아오리엔탈모터(주)대표이사신 동 진
서울 사무소
서울시 금천구 가산디지털 1로 168, 우림라이온스밸리 C동 807호
대표번호02-2026-0650기술문의080-777-2042
인천 사무소
인천광역시 남동구 앵고개로 490번길 119, 남동공단 144B - 9L
Tel032-819-8721Fax032-819-8671
사업자등록번호139-81-28682
통신판매등록 번호2017 - 인천남동구 - 0852
Copyright 2023. INA ORIENTAL MOTOR Inc. All Rights Reserved.
본 사이트의 컨텐츠는 저작권 보호를 받고 있으며,
모든 이미지와 내용 등의 상업적 이용시에 법의 제재를 받게 됩니다.