





[Stepping]
AZ시리즈 다축 드라이버와 미쓰비시전기 주식회사제 PLC를 사용하고 있습니다. 서보 온으로 하고 있습니다만, 모터가 여자하지 않습니다. 왜 그럴까요?
대상 제품
ORIENTAL MOTOR㈜ 드라이버(SSCNETIII/H) : AZD2A-KS3, AZD2B-KS3, AZD3A-KS3, AZD4A-KS3
미쓰비시전기㈜ PLC(Q시리즈 심플 모션 유닛) : QD77MS2, QD77MS4, QD77MS16
- 드라이버의 주전원 및 제어 전원이 들어오지 않음
- 통신이 이루어지지 않음 (RUN LED 소등)
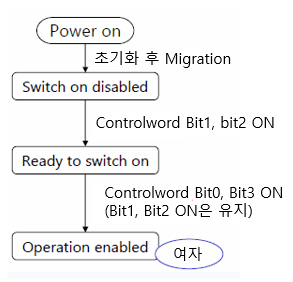
- "전 축 서보
ON" 신호를 ON으로 하여 모든 축을 서보
ON 상태로 설정했지만, 해당 축만
"Cd.100: 서보 OFF 지령"으로
서보 OFF 상태임
- 모터가 드라이버에 연결되어 있지 않음
- 알람 상태가 발생함
- 자사 지원 소프트웨어
MEXE02에서 "드라이버 동작 모드"
파라미터를 [가상 모터를 사용]으로 설정 변경한
경우

- 서포트 소프트웨어 MEXE02에서 '유효 축 수' 파라미터에 오류가 있음.
설정 대상이 아닌 축에 대해서는, 심플 모션 유닛에서 '전체
축 서보 ON' 신호를 ON해도 모터는 여자되지 않습니다.

- 서포트 소프트웨어 MEXE02에서 '리모트 운전 모드' 파라미터가 [무효]로 설정되어 있지 않음
유효로 설정되어 있으면, 심플 모션 유닛으로부터의 지령을 받을 수 없습니다.